Psy-roboty mogą wędrować przez błoto dzięki kopytom jak u łosia
Silikonowe „buciki” przyśpieszyły podróż maszyny przez estońskie lasy aż o 55%.

Zdjęcie: Centre for Biorobotics, TalTech (Simon Pierre Godon)
Wiele czworonożnych robotów może zręcznie przemierzyć nierówny obszar lub stok, ale tylko jeśli ziemia pod nimi jest względnie stabilna. Gdy podłoże jest śliskie lub błotniste, takie maszyny mogą się potykać albo całkowicie nie sprostać zadaniu, jednak pewien zespół uważa, że rozwiązaniem tego problemu jest naśladowanie zwierząt, które często można znaleźć na grząskich terenach. Według badania przeprowadzonego przez naukowców z estońskiego Uniwersytetu Technologicznego w Tallinnie (TalTech), opublikowanego w Bioinspiration & Biomimetics, psy-roboty mogłyby wziąć przykład z łosia euroazjatyckiego. „Większość robotów nie ma dostępu do wielu ważnych środowisk lądowych, na przykład do moczar, trzęsawisk, bagien nadbrzeżnych, ujść rzecznych czy miejsc, które są bogate pod względem przyrodniczym” – wyjaśniła w oświadczeniu 2 stycznia Maarja Kruusmaa, profesor biorobotyki na TalTech i przewodnicząca zespołu.
Zwierzęta kopytne, takie jak bydło i łoś, zostały ewolucyjnie przystosowane do radzenia sobie z pewnymi „kleistymi sytuacjami”. Po przeprowadzeniu eksperymentu naukowego, obserwując kopyta łosi, badacze odkryli, że to racice są w głównej mierze odpowiedzialne za radzenie sobie z podmokłymi terenami. Dzieje się tak, ponieważ racice mogą się rozkładać i kurczyć przy każdym kroku. Cały obszar palców wystawiony na kontakt powiększa się i pomniejsza podczas wchodzenia oraz wychodzenia z bagnistego terenu, co sprawia, że łoś nie zanurzy się w bajorze, nadmiernie. Ważniejsze jednak w racicach są właściwości zasysające.
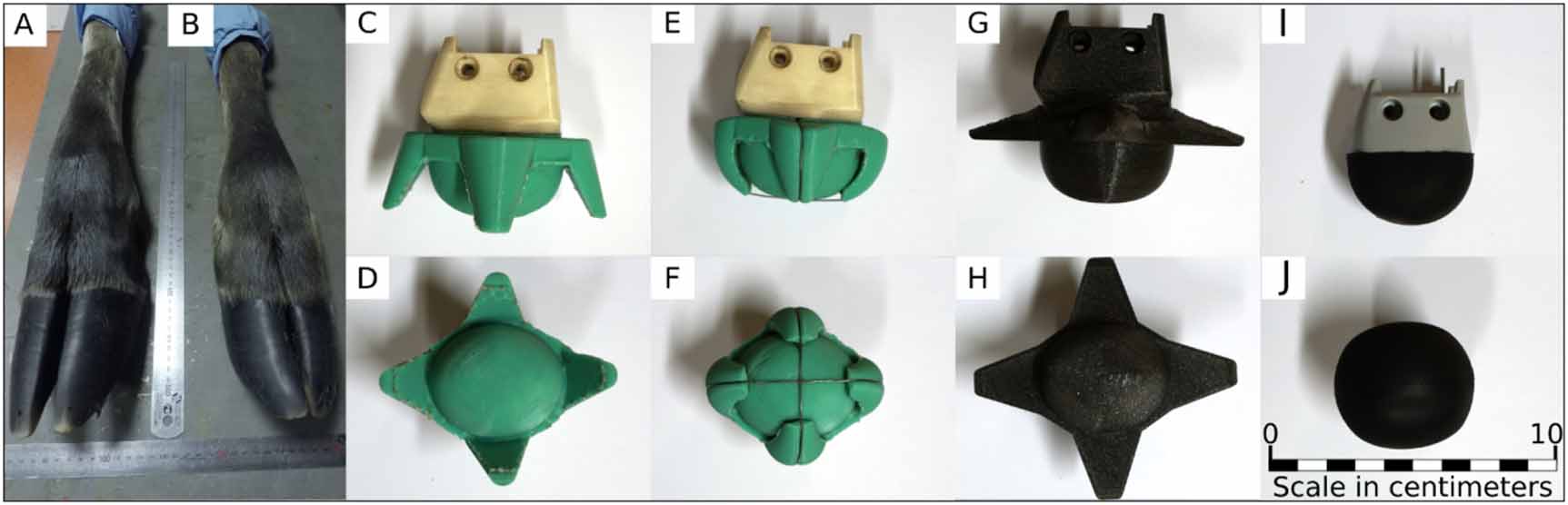 Nogi łosia i cztery testowane syntetyczne kopyta – (A) przednia noga łosia; (B) tylna noga łosia; (C), (D) model proponowanego kopyta anizotropowego inspirowanego przyrodą; (E), (F) model proponowanego kopyta anizotropowego z zamkniętymi palcami inspirowanego przyrodą; (G), (H) kopyto z nieugiętymi wysuniętymi palcami; (I), (J) komercyjna stopa Go1; zdjęcia (C)-(J) mają tę samą skalę, która została pokazana na zdjęciu (J) Zdjęcie: TalTech
Nogi łosia i cztery testowane syntetyczne kopyta – (A) przednia noga łosia; (B) tylna noga łosia; (C), (D) model proponowanego kopyta anizotropowego inspirowanego przyrodą; (E), (F) model proponowanego kopyta anizotropowego z zamkniętymi palcami inspirowanego przyrodą; (G), (H) kopyto z nieugiętymi wysuniętymi palcami; (I), (J) komercyjna stopa Go1; zdjęcia (C)-(J) mają tę samą skalę, która została pokazana na zdjęciu (J) Zdjęcie: TalTech
„Odkryliśmy, że kopyto łosia zachowuje się podobnie do przyssawki – kiedy uda ci się wcisnąć palec pod powierzchnię, siła przysysania zanika” – powiedział Simon Godon, doktorant biorobotyki i współautor pracy. Godon porównał również cechy fizyczne błota do mokrych płytek łazienkowych, które kleją się do stóp po wyjściu spod prysznica. Łosie jednak przesuwają kopyta w taki sposób, że pozwala im to przerwać napięcie powierzchniowe, przez co nie grzęzną w bajorze. Po badaniu łosi, naukowcy zaprojektowali silikonowe buciki dla czworonożnych robotów. Według wyników z analiz laboratoryjnych buciki inspirowane kopytami zmniejszają głębokość opadania o około 46% i zmniejszają moc zasysania mniej więcej o tyle samo procent. Akcesoria zmniejszyły również koszty energii chodzenia aż o 70%. Później inżynierowie wzięli tak wyposażonego psa-robota na spacer po estońskich lasach. Dalsze kalkulacje wykazały ponad 38% redukcję kosztów transportu mechanicznego i 55% zwiększenia szybkości. Co więcej, zespół napisał w swojej pracy, że kopyta inspirowane tymi łosia normalnie sobie radziły również na twardym podłożu. „Sugeruje to, że zmienione spody czworonożnych robotów polepszają ich wszechstronność i wydajność na naturalnych terenach” – wywnioskował zespół. Dzięki tym silikonowym zmianom przyszłe czworonożne roboty mogą być w stanie dostać się do wcześniej niedostępnych dla nich środowisk, by pomagać przy pomiarach gruntów, bezpieczeństwie oraz ratowaniu.
Dział: Technologia
Autor:
Andrew Paul | Tłumaczenie: Julia Kopycińska – praktykantka fundacji: https://fundacjaglosmlodych.org/praktyki/
Udostępnij





